 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Platoon
Papers and Code
LLM-Empowered Cooperative Content Caching in Vehicular Fog Caching-Assisted Platoon Networks
Feb 04, 2026This letter proposes a novel three-tier content caching architecture for Vehicular Fog Caching (VFC)-assisted platoon, where the VFC is formed by the vehicles driving near the platoon. The system strategically coordinates storage across local platoon vehicles, dynamic VFC clusters, and cloud server (CS) to minimize content retrieval latency. To efficiently manage distributed storage, we integrate large language models (LLMs) for real-time and intelligent caching decisions. The proposed approach leverages LLMs' ability to process heterogeneous information, including user profiles, historical data, content characteristics, and dynamic system states. Through a designed prompting framework encoding task objectives and caching constraints, the LLMs formulate caching as a decision-making task, and our hierarchical deterministic caching mapping strategy enables adaptive requests prediction and precise content placement across three tiers without frequent retraining. Simulation results demonstrate the advantages of our proposed caching scheme.
Multi-agent DRL-based Lane Change Decision Model for Cooperative Planning in Mixed Traffic
Jan 16, 2026Connected automated vehicles (CAVs) possess the ability to communicate and coordinate with one another, enabling cooperative platooning that enhances both energy efficiency and traffic flow. However, during the initial stage of CAV deployment, the sparse distribution of CAVs among human-driven vehicles reduces the likelihood of forming effective cooperative platoons. To address this challenge, this study proposes a hybrid multi-agent lane change decision model aimed at increasing CAV participation in cooperative platooning and maximizing its associated benefits. The proposed model employs the QMIX framework, integrating traffic data processed through a convolutional neural network (CNN-QMIX). This architecture addresses a critical issue in dynamic traffic scenarios by enabling CAVs to make optimal decisions irrespective of the varying number of CAVs present in mixed traffic. Additionally, a trajectory planner and a model predictive controller are designed to ensure smooth and safe lane-change execution. The proposed model is trained and evaluated within a microsimulation environment under varying CAV market penetration rates. The results demonstrate that the proposed model efficiently manages fluctuating traffic agent numbers, significantly outperforming the baseline rule-based models. Notably, it enhances cooperative platooning rates up to 26.2\%, showcasing its potential to optimize CAV cooperation and traffic dynamics during the early stage of deployment.
Attention in Motion: Secure Platooning via Transformer-based Misbehavior Detection
Dec 22, 2025Vehicular platooning promises transformative improvements in transportation efficiency and safety through the coordination of multi-vehicle formations enabled by Vehicle-to-Everything (V2X) communication. However, the distributed nature of platoon coordination creates security vulnerabilities, allowing authenticated vehicles to inject falsified kinematic data, compromise operational stability, and pose a threat to passenger safety. Traditional misbehaviour detection approaches, which rely on plausibility checks and statistical methods, suffer from high False Positive (FP) rates and cannot capture the complex temporal dependencies inherent in multi-vehicle coordination dynamics. We present Attention In Motion (AIMformer), a transformer-based framework specifically tailored for real-time misbehaviour detection in vehicular platoons with edge deployment capabilities. AIMformer leverages multi-head self-attention mechanisms to simultaneously capture intra-vehicle temporal dynamics and inter-vehicle spatial correlations. It incorporates global positional encoding with vehicle-specific temporal offsets to handle join/exit maneuvers. We propose a Precision-Focused Binary Cross-Entropy (PFBCE) loss function that penalizes FPs to meet the requirements of safety-critical vehicular systems. Extensive evaluation across 4 platoon controllers, multiple attack vectors, and diverse mobility scenarios demonstrates superior performance ($\geq$ 0.93) compared to state-of-the-art baseline architectures. A comprehensive deployment analysis utilizing TensorFlow Lite (TFLite), Open Neural Network Exchange (ONNX), and TensorRT achieves sub-millisecond inference latency, making it suitable for real-time operation on resource-constrained edge platforms. Hence, validating AIMformer is viable for both in-vehicle and roadside infrastructure deployment.
C2TE: Coordinated Constrained Task Execution Design for Ordering-Flexible Multi-Vehicle Platoon Merging
Jun 16, 2025In this paper, we propose a distributed coordinated constrained task execution (C2TE) algorithm that enables a team of vehicles from different lanes to cooperatively merge into an {\it ordering-flexible platoon} maneuvering on the desired lane. Therein, the platoon is flexible in the sense that no specific spatial ordering sequences of vehicles are predetermined. To attain such a flexible platoon, we first separate the multi-vehicle platoon (MVP) merging mission into two stages, namely, pre-merging regulation and {\it ordering-flexible platoon} merging, and then formulate them into distributed constraint-based optimization problems. Particularly, by encoding longitudinal-distance regulation and same-lane collision avoidance subtasks into the corresponding control barrier function (CBF) constraints, the proposed algorithm in Stage 1 can safely enlarge sufficient longitudinal distances among adjacent vehicles. Then, by encoding lateral convergence, longitudinal-target attraction, and neighboring collision avoidance subtasks into CBF constraints, the proposed algorithm in Stage~2 can efficiently achieve the {\it ordering-flexible platoon}. Note that the {\it ordering-flexible platoon} is realized through the interaction of the longitudinal-target attraction and time-varying neighboring collision avoidance constraints simultaneously. Feasibility guarantee and rigorous convergence analysis are both provided under strong nonlinear couplings induced by flexible orderings. Finally, experiments using three autonomous mobile vehicles (AMVs) are conducted to verify the effectiveness and flexibility of the proposed algorithm, and extensive simulations are performed to demonstrate its robustness, adaptability, and scalability when tackling vehicles' sudden breakdown, new appearing, different number of lanes, mixed autonomy, and large-scale scenarios, respectively.
Incorporating Failure of Machine Learning in Dynamic Probabilistic Safety Assurance
Jun 07, 2025Machine Learning (ML) models are increasingly integrated into safety-critical systems, such as autonomous vehicle platooning, to enable real-time decision-making. However, their inherent imperfection introduces a new class of failure: reasoning failures often triggered by distributional shifts between operational and training data. Traditional safety assessment methods, which rely on design artefacts or code, are ill-suited for ML components that learn behaviour from data. SafeML was recently proposed to dynamically detect such shifts and assign confidence levels to the reasoning of ML-based components. Building on this, we introduce a probabilistic safety assurance framework that integrates SafeML with Bayesian Networks (BNs) to model ML failures as part of a broader causal safety analysis. This allows for dynamic safety evaluation and system adaptation under uncertainty. We demonstrate the approach on an simulated automotive platooning system with traffic sign recognition. The findings highlight the potential broader benefits of explicitly modelling ML failures in safety assessment.
AttentionGuard: Transformer-based Misbehavior Detection for Secure Vehicular Platoons
May 15, 2025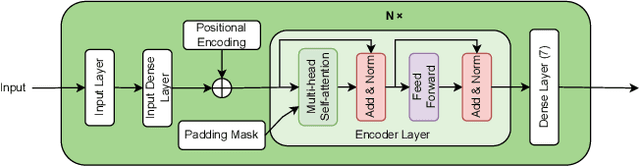


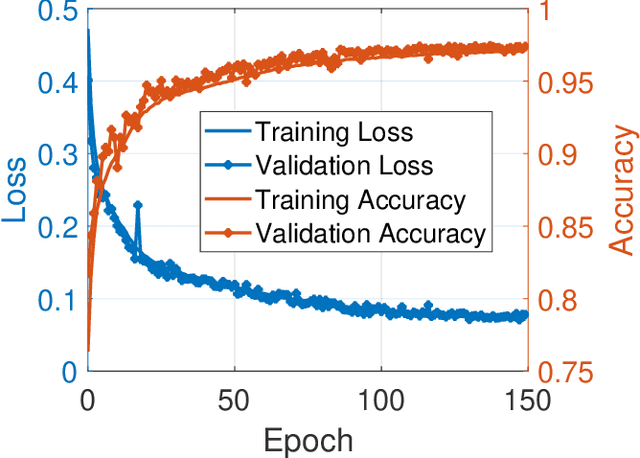
Vehicle platooning, with vehicles traveling in close formation coordinated through Vehicle-to-Everything (V2X) communications, offers significant benefits in fuel efficiency and road utilization. However, it is vulnerable to sophisticated falsification attacks by authenticated insiders that can destabilize the formation and potentially cause catastrophic collisions. This paper addresses this challenge: misbehavior detection in vehicle platooning systems. We present AttentionGuard, a transformer-based framework for misbehavior detection that leverages the self-attention mechanism to identify anomalous patterns in mobility data. Our proposal employs a multi-head transformer-encoder to process sequential kinematic information, enabling effective differentiation between normal mobility patterns and falsification attacks across diverse platooning scenarios, including steady-state (no-maneuver) operation, join, and exit maneuvers. Our evaluation uses an extensive simulation dataset featuring various attack vectors (constant, gradual, and combined falsifications) and operational parameters (controller types, vehicle speeds, and attacker positions). Experimental results demonstrate that AttentionGuard achieves up to 0.95 F1-score in attack detection, with robust performance maintained during complex maneuvers. Notably, our system performs effectively with minimal latency (100ms decision intervals), making it suitable for real-time transportation safety applications. Comparative analysis reveals superior detection capabilities and establishes the transformer-encoder as a promising approach for securing Cooperative Intelligent Transport Systems (C-ITS) against sophisticated insider threats.
Centralized Decision-Making for Platooning By Using SPaT-Driven Reference Speeds
May 09, 2025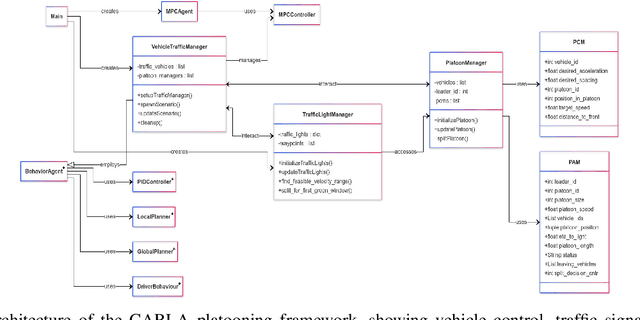



This paper introduces a centralized approach for fuel-efficient urban platooning by leveraging real-time Vehicle- to-Everything (V2X) communication and Signal Phase and Timing (SPaT) data. A nonlinear Model Predictive Control (MPC) algorithm optimizes the trajectories of platoon leader vehicles, employing an asymmetric cost function to minimize fuel-intensive acceleration. Following vehicles utilize a gap- and velocity-based control strategy, complemented by dynamic platoon splitting logic communicated through Platoon Control Messages (PCM) and Platoon Awareness Messages (PAM). Simulation results obtained from the CARLA environment demonstrate substantial fuel savings of up to 41.2%, along with smoother traffic flows, fewer vehicle stops, and improved intersection throughput.
Confidence Boosts Trust-Based Resilience in Cooperative Multi-Robot Systems
Jun 10, 2025Wireless communication-based multi-robot systems open the door to cyberattacks that can disrupt safety and performance of collaborative robots. The physical channel supporting inter-robot communication offers an attractive opportunity to decouple the detection of malicious robots from task-relevant data exchange between legitimate robots. Yet, trustworthiness indications coming from physical channels are uncertain and must be handled with this in mind. In this paper, we propose a resilient protocol for multi-robot operation wherein a parameter {\lambda}t accounts for how confident a robot is about the legitimacy of nearby robots that the physical channel indicates. Analytical results prove that our protocol achieves resilient coordination with arbitrarily many malicious robots under mild assumptions. Tuning {\lambda}t allows a designer to trade between near-optimal inter-robot coordination and quick task execution; see Fig. 1. This is a fundamental performance tradeoff and must be carefully evaluated based on the task at hand. The effectiveness of our approach is numerically verified with experiments involving platoons of autonomous cars where some vehicles are maliciously spoofed.
Modeling, Translation, and Analysis of Different examples using Simulink, Stateflow, SpaceEx, and FlowStar
Apr 06, 2025This report details the translation and testing of multiple benchmarks, including the Six Vehicle Platoon, Two Bouncing Ball, Three Tank System, and Four-Dimensional Linear Switching, which represent continuous and hybrid systems. These benchmarks were gathered from past instances involving diverse verification tools such as SpaceEx, Flow*, HyST, MATLAB-Simulink, Stateflow, etc. They cover a range of systems modeled as hybrid automata, providing a comprehensive set for analysis and evaluation. Initially, we created models for all four systems using various suitable tools. Subsequently, these models were converted to the SpaceEx format and then translated into different formats compatible with various verification tools. Adapting our approach to the dynamic characteristics of each system, we performed reachability analysis using the respective verification tools.
Enhancing Vehicular Platooning with Wireless Federated Learning: A Resource-Aware Control Framework
Jul 01, 2025This paper aims to enhance the performance of Vehicular Platooning (VP) systems integrated with Wireless Federated Learning (WFL). In highly dynamic environments, vehicular platoons experience frequent communication changes and resource constraints, which significantly affect information exchange and learning model synchronization. To address these challenges, we first formulate WFL in VP as a joint optimization problem that simultaneously considers Age of Information (AoI) and Federated Learning Model Drift (FLMD) to ensure timely and accurate control. Through theoretical analysis, we examine the impact of FLMD on convergence performance and develop a two-stage Resource-Aware Control framework (RACE). The first stage employs a Lagrangian dual decomposition method for resource configuration, while the second stage implements a multi-agent deep reinforcement learning approach for vehicle selection. The approach integrates Multi-Head Self-Attention and Long Short-Term Memory networks to capture spatiotemporal correlations in communication states. Experimental results demonstrate that, compared to baseline methods, the proposed framework improves AoI optimization by up to 45%, accelerates learning convergence, and adapts more effectively to dynamic VP environments on the AI4MARS dataset.